6. Nekomimi Ultrasonic Sensor¶
6.1. The Ultrasonic Sensor¶
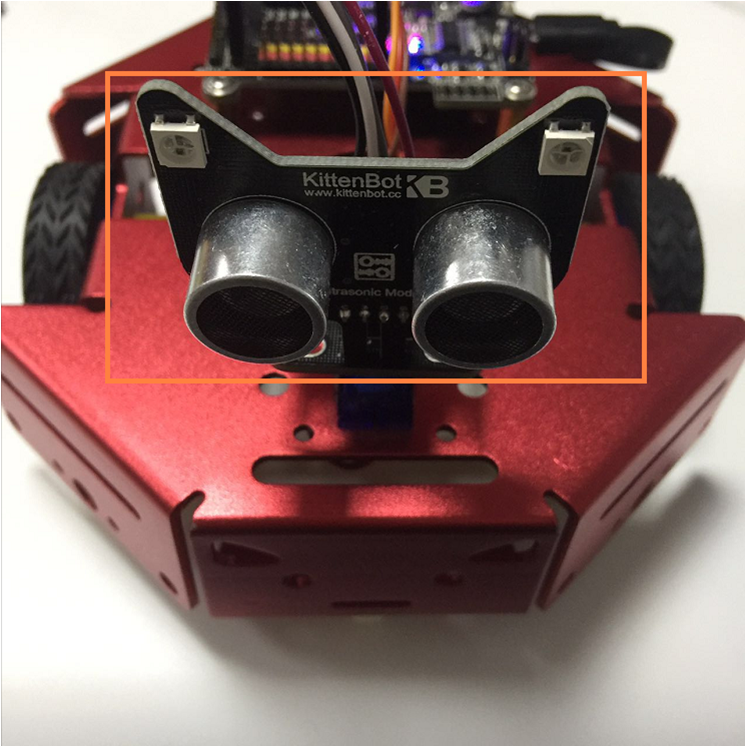
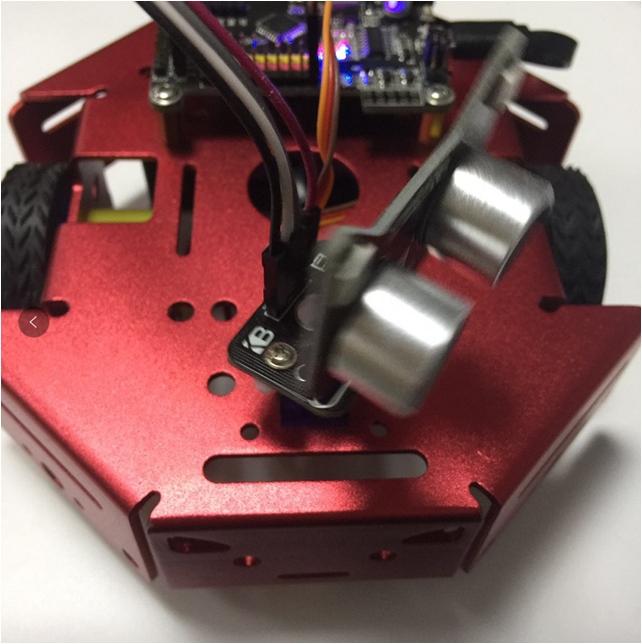
6.2. Wiring¶
The wiring is the same as last post, and double check the wiring before you power on.
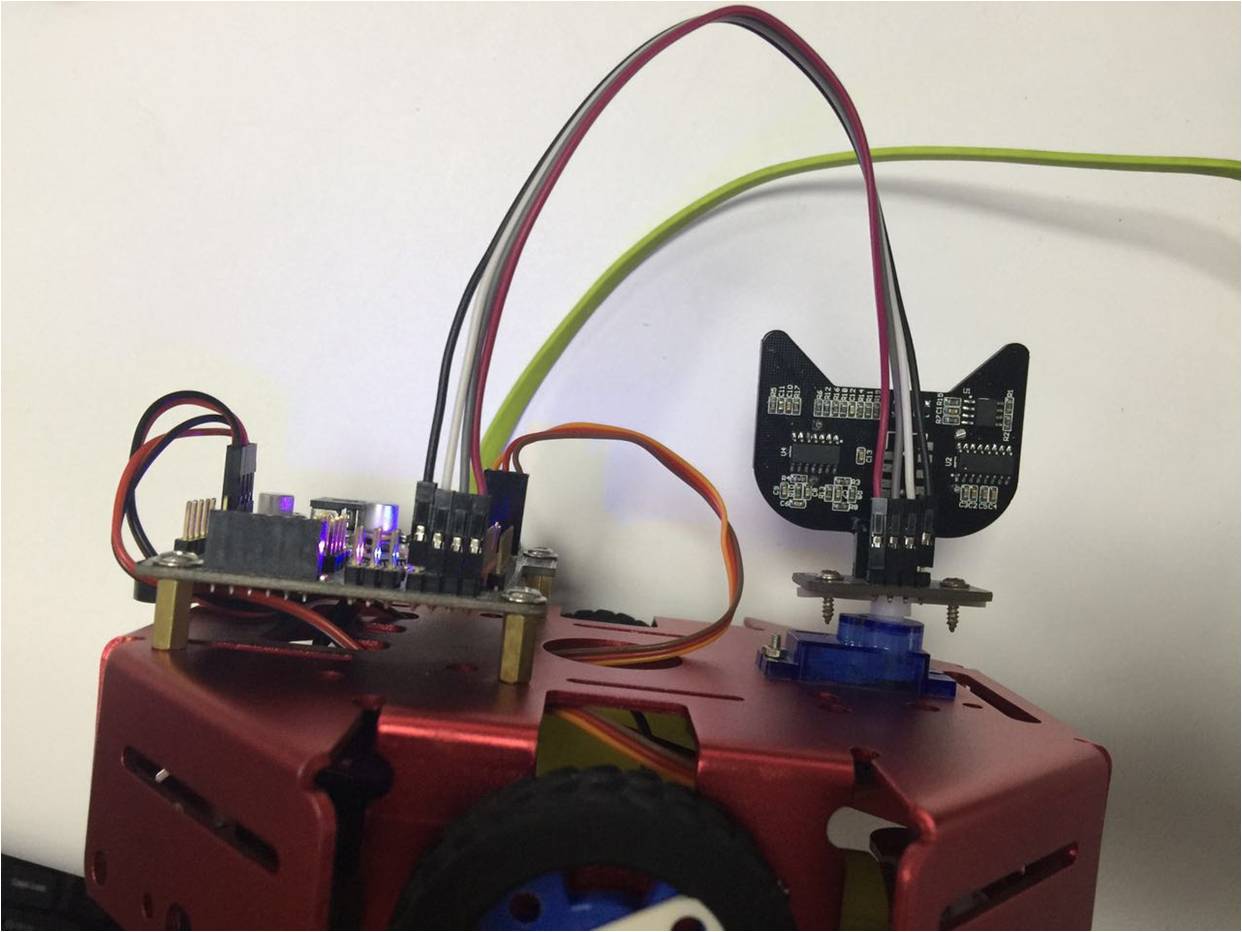
Adapter->Mainboard
- V——5V
- 1——D2 // The Ultrasonic Sensor
- G——GND
- 2——D3 // The RGB pixel
6.3. Block for distance sensing¶
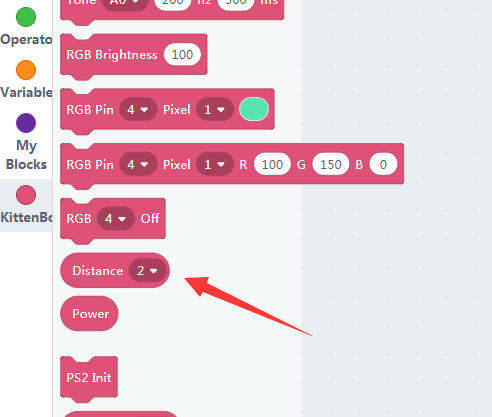
There is only one input slot in the block, which PIN you connect to.
The detecting distance ranging from 5~200cm.
6.4. Read distance¶
Make sure you have restored the firmware before using online mode
Drag a distance block to the workspace and click, you will read the distance echo.
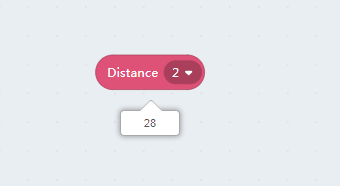
If you read 999 please check your wiring.
6.5. Shake head if the robot detects someone¶
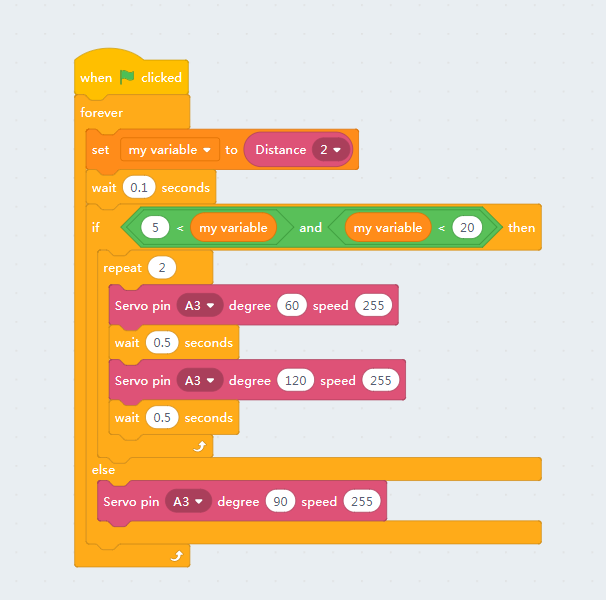
According to the above figure, drag the blocks out of flyout panel to make a complete program.
The green flag block is necessary.
The robot will shake head if your palm is too near.
PS: If you have ever used other ultrasonic sensor like sr-04, it needs one of each trig and echo pin. Kittenblock support almost most common arduino compatible electronic modules, you may find Arduino in the hardware dropdown.
PS2: If you have a 2.0 version of NekoMimi module it will extend to 300cm and support input voltage of 3.3V.